3D acoustic localization
What does an owl hear?
Asymmetric ears + 30 µs ITD resolution = 2° angular precision in pure dark. The trick is anatomy, not timing.
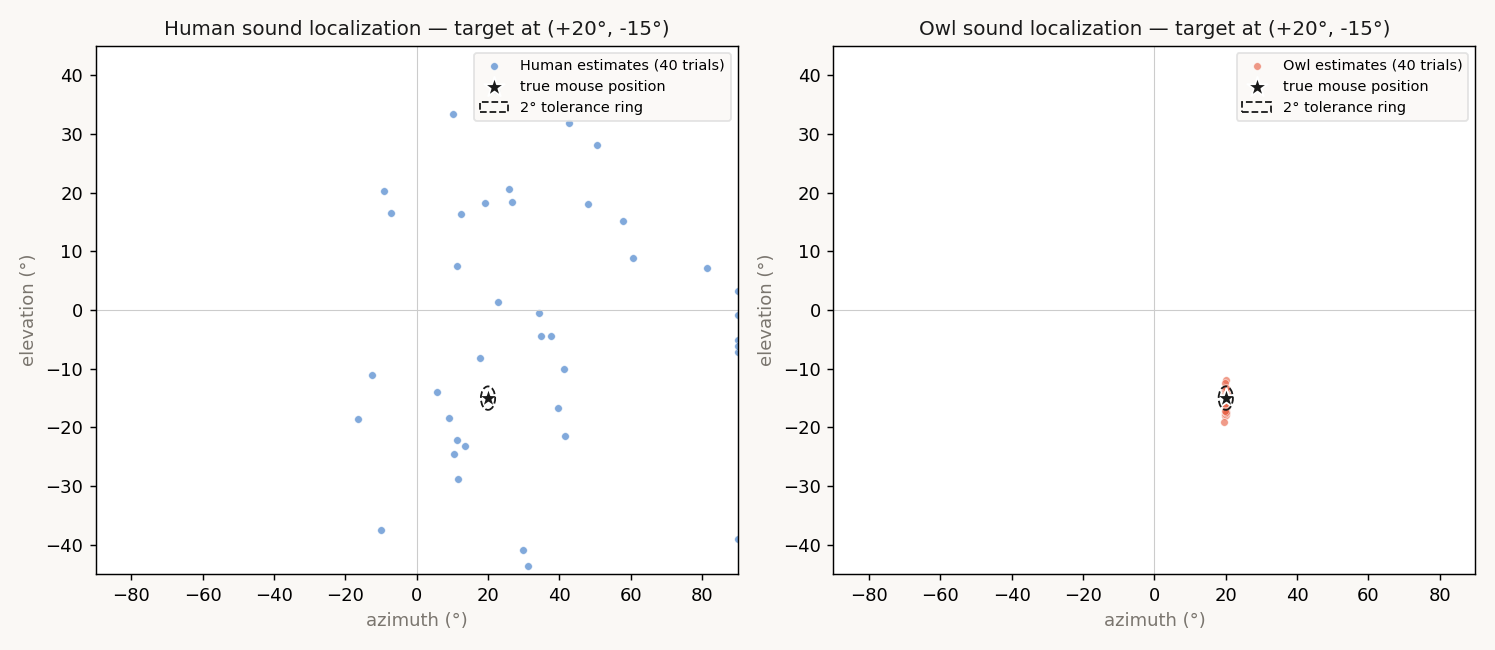
40 simulated localization trials, target at +20° azimuth / -15° elevation
Human — RMS 36.7°
Owl — RMS 1.60°
Snap your fingers. Watch the owl pinpoint, the human wander.
owl error
—
human error
—
onsets
0
tap above to enable the mic
The math behind it
Each function carries a @verify contract that compiles to a Lean theorem about its bounds. The same source compiles to C, Verilog, HLSL, and 28 more targets. View the experiment on GitHub →
interaural_time.emlchain 1module interaural_time;
const SPEED_OF_SOUND_M_S: Real = 343.0
const EAR_SEPARATION_M: Real = 0.06
@verify(lean, theorem = "itd_bounded_by_max_path")
fn interaural_time(angle_rad: Real) -> Real
ensures (result <= EAR_SEPARATION_M / SPEED_OF_SOUND_M_S)
ensures (result >= -EAR_SEPARATION_M / SPEED_OF_SOUND_M_S)
{
clamp(EAR_SEPARATION_M * sin(angle_rad) / SPEED_OF_SOUND_M_S,
-EAR_SEPARATION_M / SPEED_OF_SOUND_M_S,
EAR_SEPARATION_M / SPEED_OF_SOUND_M_S)
}vertical_offset.emlchain 1module vertical_offset;
const SPEED_OF_SOUND_M_S: Real = 343.0
const VERTICAL_EAR_OFFSET_M: Real = 0.007
@verify(lean, theorem = "vertical_itd_bounded")
fn vertical_offset(elevation_rad: Real) -> Real
ensures (result <= VERTICAL_EAR_OFFSET_M / SPEED_OF_SOUND_M_S)
ensures (result >= -VERTICAL_EAR_OFFSET_M / SPEED_OF_SOUND_M_S)
{
clamp(VERTICAL_EAR_OFFSET_M * sin(elevation_rad) / SPEED_OF_SOUND_M_S,
-VERTICAL_EAR_OFFSET_M / SPEED_OF_SOUND_M_S,
VERTICAL_EAR_OFFSET_M / SPEED_OF_SOUND_M_S)
}azimuth_estimate.emlchain 1module azimuth_estimate;
const SPEED_OF_SOUND_M_S: Real = 343.0
const EAR_SEPARATION_M: Real = 0.06
const HALF_PI: Real = 1.5707963267948966
@verify(lean, theorem = "azimuth_in_valid_range")
fn azimuth_from_itd(delta_t_s: Real) -> Real
ensures (result >= -HALF_PI)
ensures (result <= HALF_PI)
{
clamp(asin(clamp(delta_t_s * SPEED_OF_SOUND_M_S / EAR_SEPARATION_M,
-1.0, 1.0)),
-HALF_PI, HALF_PI)
}elevation_estimate.emlchain 1module elevation_estimate;
const SPEED_OF_SOUND_M_S: Real = 343.0
const VERTICAL_EAR_OFFSET_M: Real = 0.007
const HALF_PI: Real = 1.5707963267948966
@verify(lean, theorem = "elevation_in_valid_range")
fn elevation_from_vertical_itd(dt_v: Real) -> Real
ensures (result >= -HALF_PI)
ensures (result <= HALF_PI)
{
clamp(asin(clamp(dt_v * SPEED_OF_SOUND_M_S / VERTICAL_EAR_OFFSET_M,
-1.0, 1.0)),
-HALF_PI, HALF_PI)
}Same EML pipeline. Different sense.
Eight more cross-species sensor models live alongside this one — bat sonar, owl 3D hearing, pit-viper infrared, dog olfaction, pigeon magnetoreception, shark electric sense, mantis shrimp 16-channel hyperspectral, spider web vibration.
See all nine senses →