Infrared sensing — no human analog
What does a pit viper see?
Biological mid-IR bolometry — Planck's law plus a 0.003 °C threshold. Pure math, modeled in EML, mathematically verified.
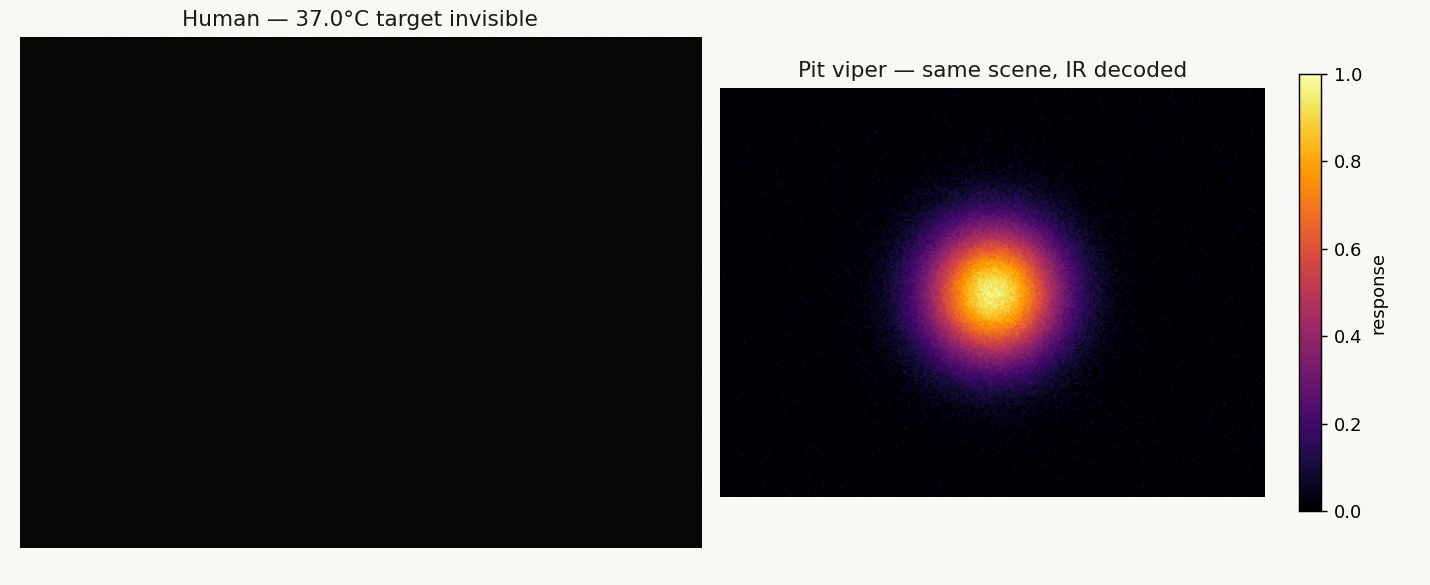
human view (dark room) · pit viper view (37 °C mouse, IR-decoded)
See yourself in the viper’s view (front camera).
Phones don’t have IR sensors. We detect skin-tone pixels and render them as thermal blobs — close enough to feel the gap. Wave your hand slowly; the trail is the “0.003 °C resolution” in your hand.
The math behind it
Each function carries a @verify contract that compiles to a Lean theorem about its bounds. The same source compiles to C, Verilog, HLSL, and 28 more targets. View the experiment on GitHub →
planck_radiation.emlchain 1module planck_radiation;
const PLANCK_H_J_S: Real = 6.626e-34
const SPEED_C_M_S: Real = 2.998e8
const BOLTZMANN_K_J_K: Real = 1.381e-23
@verify(lean, theorem = "planck_radiance_nonneg")
fn planck_radiance(wavelength_m: Real, temperature_k: Real) -> Real
requires (wavelength_m > 0.0)
requires (temperature_k > 0.0)
ensures (result >= 0.0)
{
max(0.0,
(2.0 * PLANCK_H_J_S * SPEED_C_M_S * SPEED_C_M_S
/ pow(wavelength_m, 5.0))
/ (exp((PLANCK_H_J_S * SPEED_C_M_S)
/ (wavelength_m * BOLTZMANN_K_J_K * temperature_k)) - 1.0)
)
}pit_organ.emlchain 0module pit_organ;
const THRESHOLD_C: Real = 0.003
const SENSITIVITY_C: Real = 1.0
@verify(lean, theorem = "pit_organ_response_nonneg")
fn pit_organ_response(delta_t_c: Real) -> Real
ensures (result >= 0.0)
{
max(0.0, (delta_t_c - THRESHOLD_C) / SENSITIVITY_C)
}spatial_resolution.emlchain 1module spatial_resolution;
const PI: Real = 3.14159265358979
@verify(lean, theorem = "spatial_resolution_in_range")
fn spatial_resolution(aperture_m: Real, depth_m: Real) -> Real
requires (aperture_m >= 0.0)
requires (depth_m > 0.0)
ensures (result >= 0.0)
ensures (result <= PI)
{
clamp(2.0 * atan(aperture_m / (2.0 * depth_m)), 0.0, PI)
}Same EML pipeline. Different sense.
Eight more cross-species sensor models live alongside this one — bat sonar, owl 3D hearing, pit-viper infrared, dog olfaction, pigeon magnetoreception, shark electric sense, mantis shrimp 16-channel hyperspectral, spider web vibration.
See all nine senses →